新闻网讯(通讯员王群)9月15日,第六届全国水下机器人大赛(2022-CURPC)国际线上赛决赛落下帷幕。卫星导航定位技术研究中心博士生韩震、硕士生张峰瑞在研究员江鹏的指导下,夺得“水下声学通信解码与辨识智能算法”赛道冠军,斩获奖金10万元。这也是武汉大学团队首次夺得该项赛事冠军。
大赛在水下通信、水下智能感知、赋能机器人学、智能系统和海洋工程等领域进行研究探索,聚焦海洋通信环境大数据智能应用,推进水下机器人和水下通信、导航、探测等技术深入发展。本届大赛分设“水下通信赛—水下声学通信解码与辨识智能算法”与“水下感知赛—水下声光图像增强与检测智能算法”两大赛道,分别针对水下机器人水下感知能力与信息传输两大问题征集优质算法。
水下通信赛赛程分为A、B、C三个阶段,前导序列逐次减少,充分考验了各参赛队伍水声接收解调算法的信道跟踪能力以及嵌入式部署能力。武汉大学团队在A、B、C阶段信息正确率分别达到99.999%、100%、100%(均排行第一位),综合最终答辩环节,获得本次赛事水下通信赛第一名。
2022全国水下机器人大赛-水下通信赛决赛线上答辩现场
水下通信赛题由赛事方提供海洋实采水声通信信号,要求各参赛队伍完成通信解码并进行嵌入式实现,模拟实时水声通信。该水声信道多径混响时延长达数十毫秒,具有明显的动态多普勒效应且掺杂复杂的海洋背景噪声。信号帧格式包含同步信号、前导序列以及信息序列,参赛队伍可根据信号特征实现信息的正确解调。
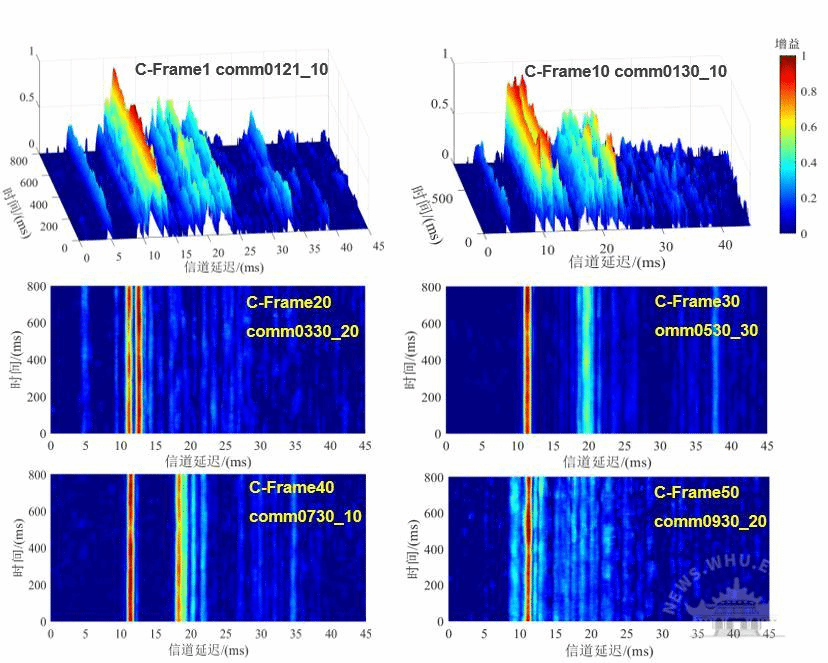
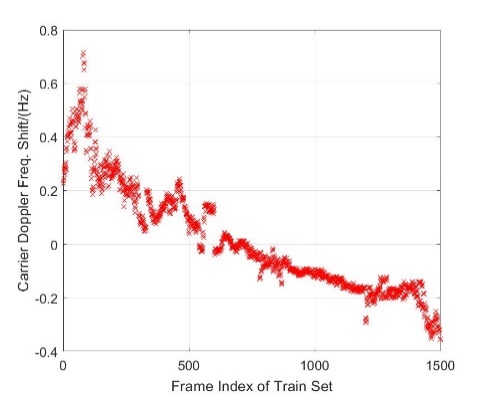
复杂多径长时混响与动态多普勒水声信道
武汉大学团队针对嵌入式实时通信要求,提出了匹配滤波能量概率分布的实时帧同步检测方法,实现信号帧的实时同步。针对恶劣信道数据,优化了双向均衡器结构以及混合稀疏自适应更新算法,联合插值锁相环对抗多普勒效应,保障信息的正确解调。采用稀疏压缩感知以适应低算力下的实时处理,寻找均衡器解向量的稀疏解:
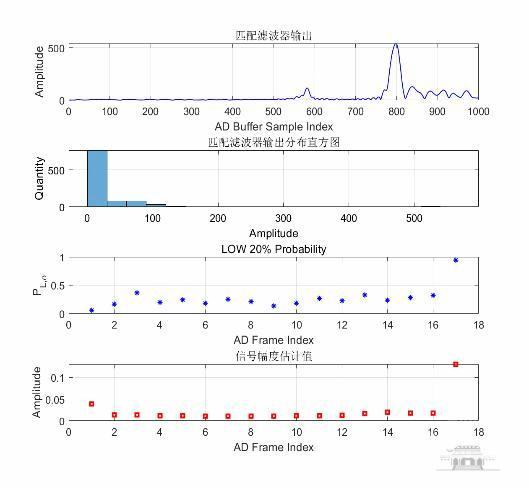
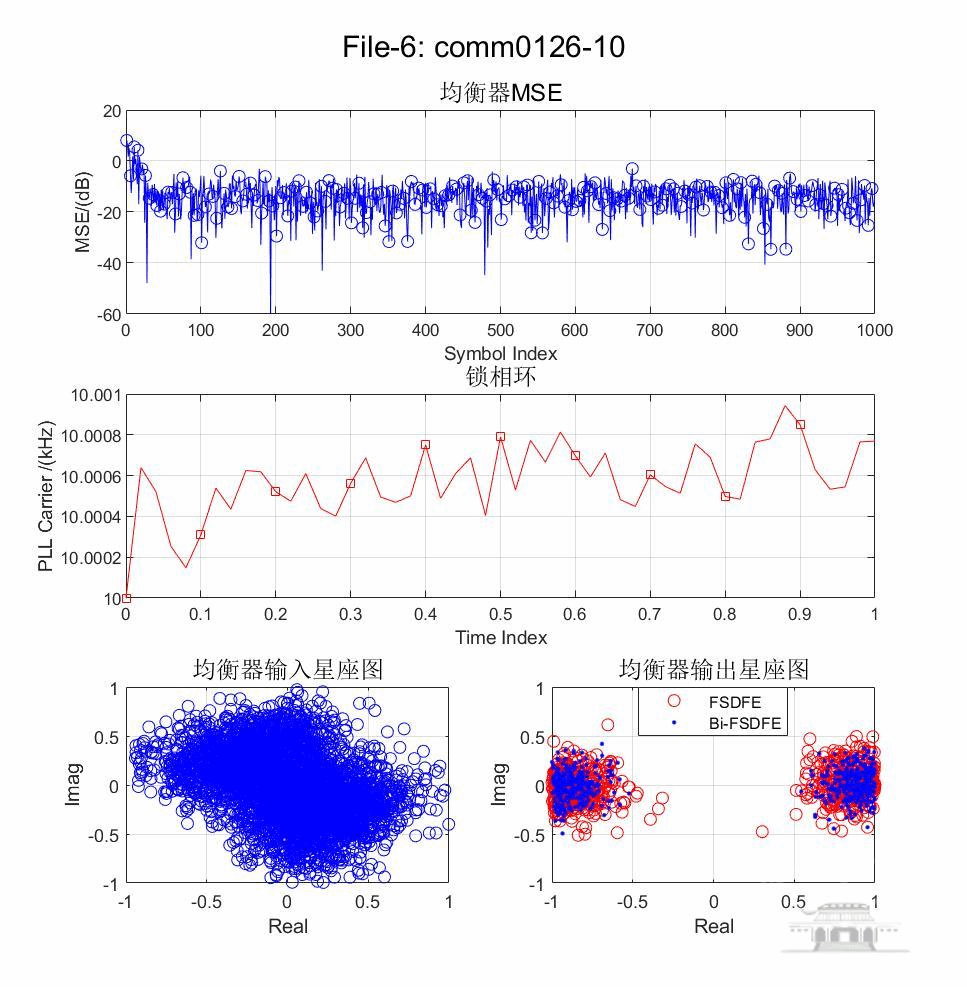
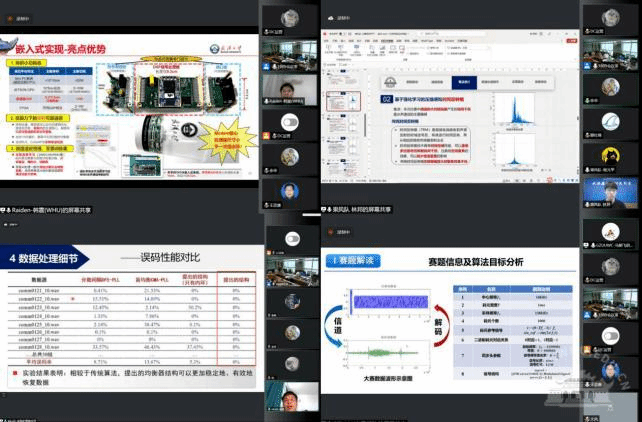
武汉大学团队实时帧同步、信道均衡处理结果
武汉大学团队所设计的实时水声通信嵌入式核心接收系统优于9.2*5.5cm,功耗不超过1W,通过cache多级缓存、混合定浮点计算、算法优化等手段,在保证通信指标的情况下有效控制了设备功耗体积,达到国内前列。
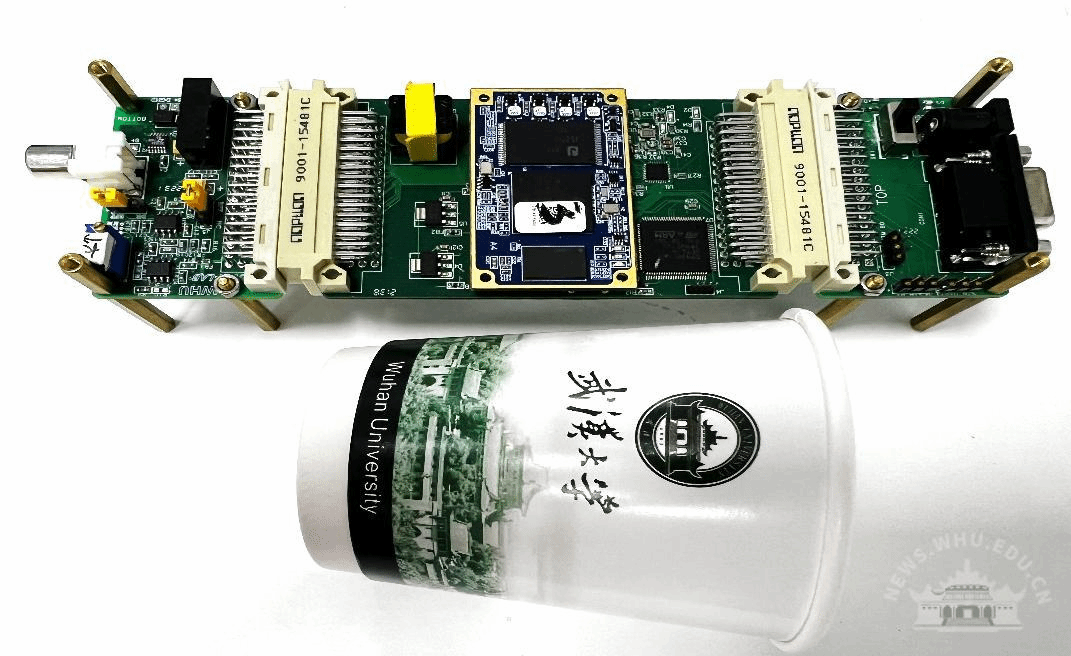
武汉大学团队嵌入式实时水声通信接收机
据悉,该赛事由中国国家自然科学基金委员会指导举办。自今年大赛正式开赛以来,共吸引了包括中国大陆、澳大利亚、英国、中国香港、中国澳门等5个国家地区在内的知名高等院校、企事业单位等共1302支参赛团队参与算法竞技。赛事评委由来自北京大学、西北工业大学、浙江大学、中科院、中船重工等18所高校与科研院所的26位专家学者组成。
(供图:卫星导航定位技术研究中心 编辑:相茹)